PMSMは回転子の構造的特徴から、突極性のあるもの(IPMSM)とないもの(SPMSM)に大別されます。
以前の記事では突極性のないSPMSMを対象にトルク特性を扱っていましたので、本記事では突極性のあるIPMSMを対象にしていきます。
突極性のあるPMSMのトルク特性
PMSMの出力トルクはdq軸電流やモータパラメータを使って以下の式で表されます。
突極性がない(つまり、Ld=Lqである)場合に対して、突極性がある(つまりLd≠Lqである)場合は
出力トルクとして、第一項に加えて、第二項も利用できることになります。
一般的に第一項をマグネットトルク、第二項をリラクタンストルクと呼びます。
このリラクタンストルクを有効に利用できる点が突極性のあるIPMSMのメリットであるともいえます。
また、リラクタンストルクはdq軸電流の積に関連し、かつ出力トルクはマグネットトルクとリラクタンストルクの和で決まることから、同一のトルクを出力するためのdq軸電流の組み合わせが無数に存在する点もIPMSMの特徴として挙げられます。
\[ T = Pn\{ψ_f+(Ld-Lq)Id\}Iq・・・①\\Id:d軸電流、Iq:q軸電流、Ra:巻線抵抗、\\Ld:d軸インダクタンス、Lq:q軸インダクタンス、ψ_f:磁石磁束、\\Pn:極対数、ω:電気角速度、p:微分演算子\\ T = Pn\{ψ_f Iamp \cos β-\frac{1}{2}(Ld-Lq)Iamp \sin 2β\}・・・②\\Iamp:電流振幅、β:電流位相\]
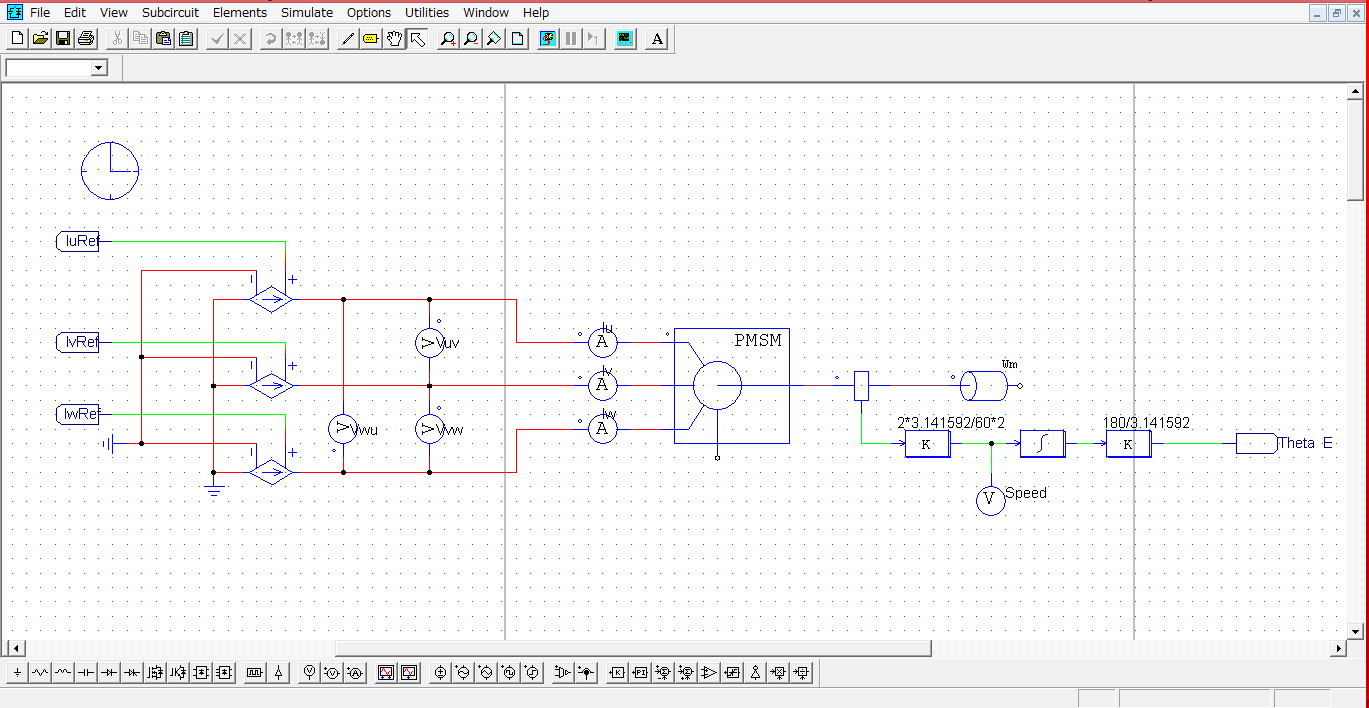
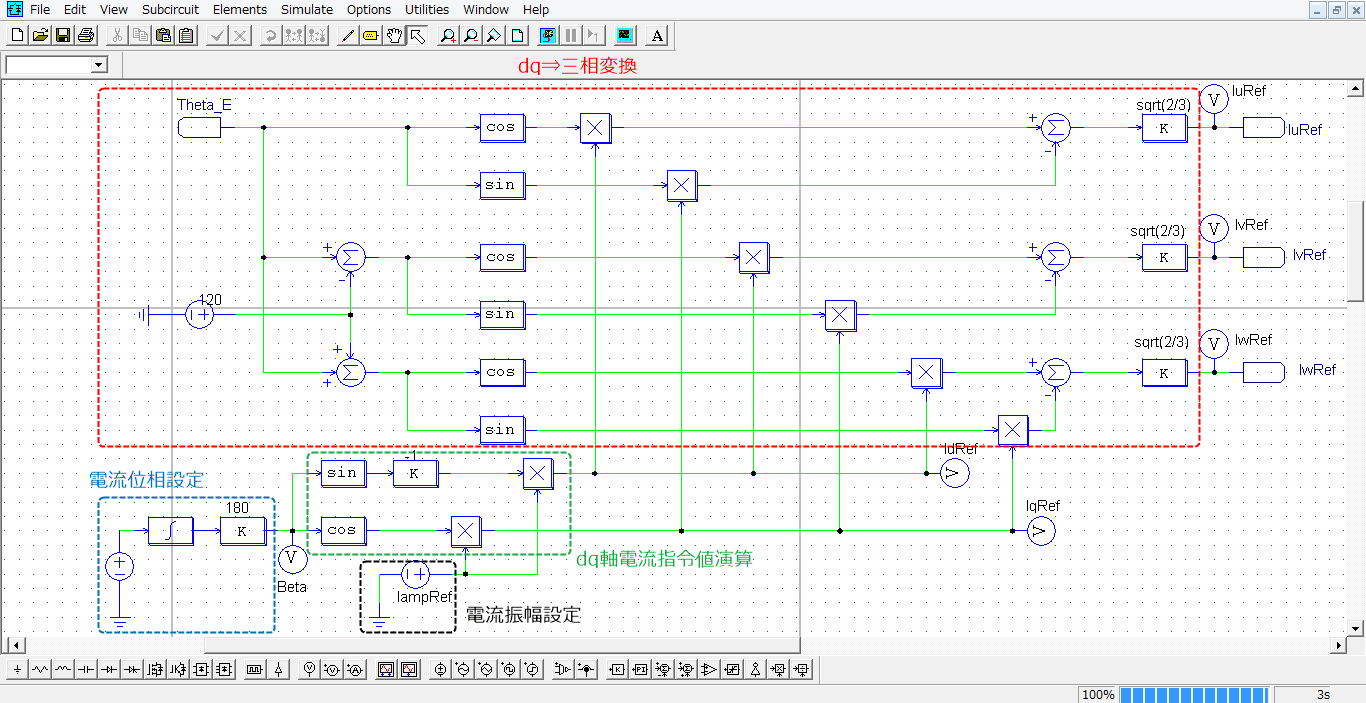
シミュレーションモデル
こちらの記事と同様の主回路/制御部を使用して検証を行っていきます。
設定パラメータも基本的には上の記事と同じですが、PMSMブロックのdq軸インダクタンスの
設定のみ、突極性を有したモデルでのシミュレーションを行うため、以下のように変更をしています。
【PMSMブロック】
Ld: 0.027(H)
Lq: 0.067(H)
なお、今回のシミュレーションは以下の①~③の条件で行っていきます。
※特に記載がない場合は上の記事と同様です。
条件① 電流振幅=100A,電流位相を0⇒360degにスロープ状に増加
条件② 電流振幅=10A,電流位相を0⇒360degにスロープ状に増加
条件③ ①と同様の条件でPMSMモデルのLq設定値を0.067(H) ⇒ 0.037(H)に変更
シミュレーション結果
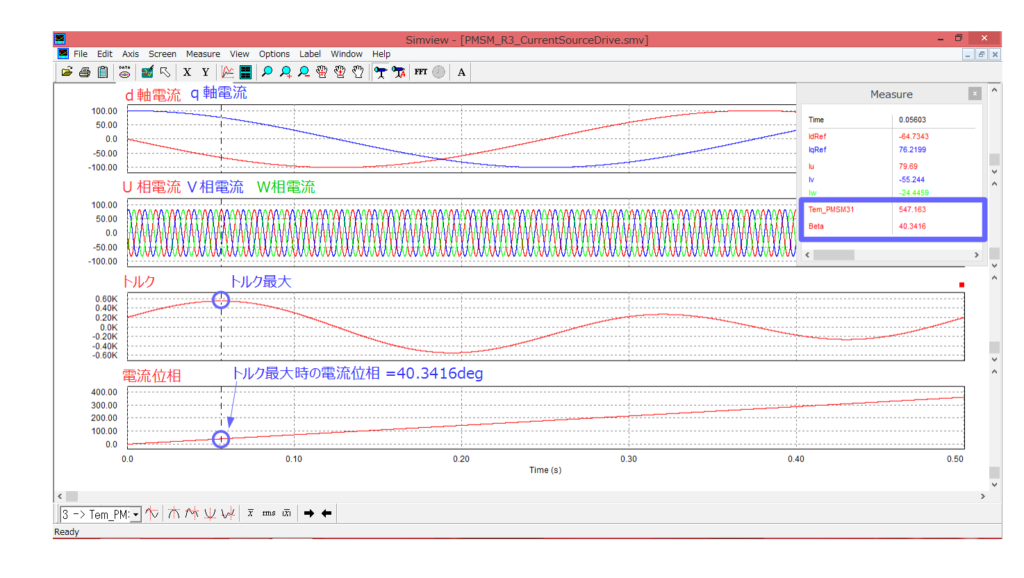
条件①の結果
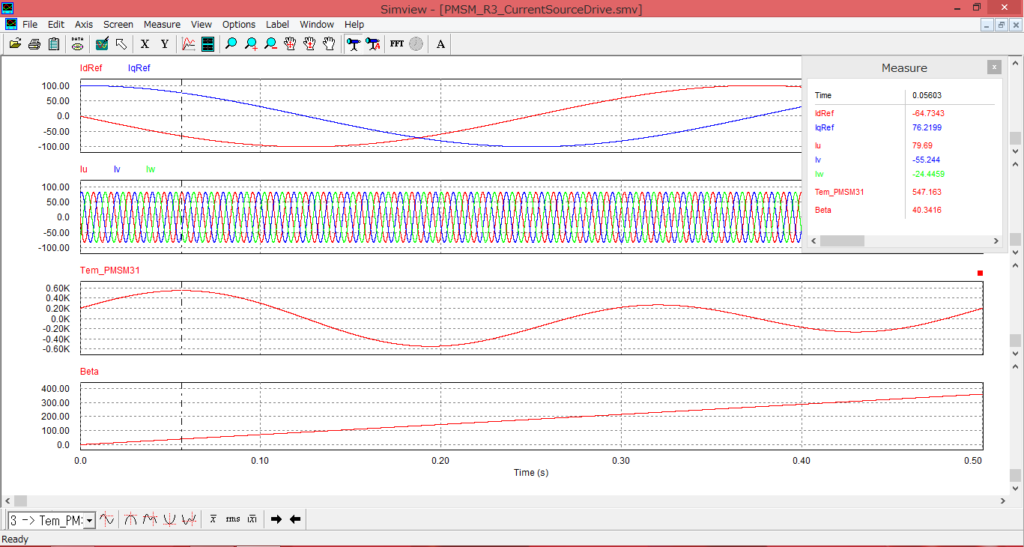
まず、条件①の結果を以下に示します。
電流位相の変動とともにdq軸電流が変化していきますが、突極性がない場合、電流位相0degで
トルク最大値であったのに対して、電流位相=40.3416degでトルク最大値をとっていることが
確認できます。
※ピーク値の簡単な探索方法については以下をご覧ください
また、トルクの最大値も突極性がない場合は200Nmだったのに対して、547.163Nmと
増加していることがわかります。
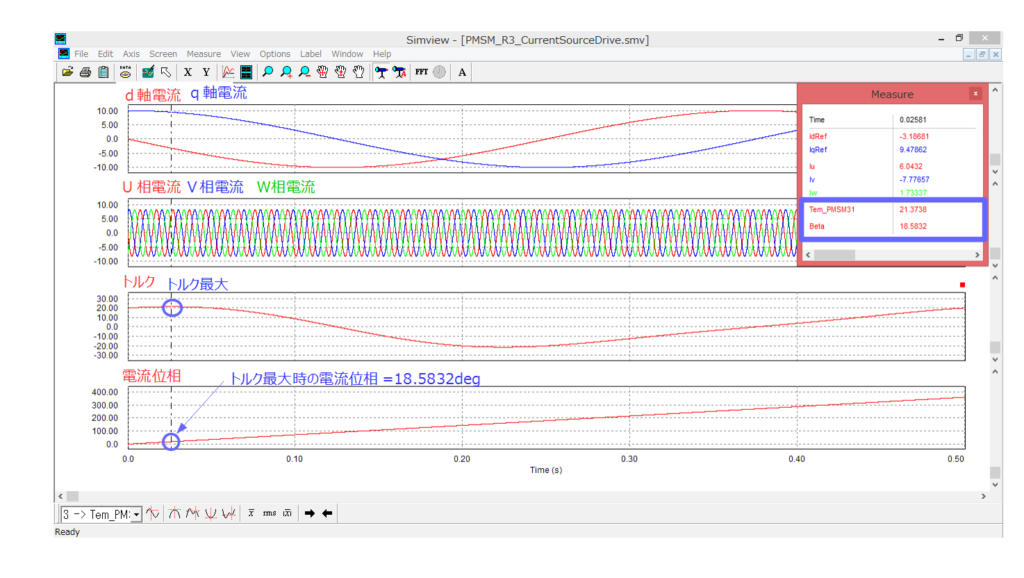
条件②の結果
次に条件②で、電流振幅を100A⇒10Aに変更した場合のシミュレーション結果を示しています。
電流振幅が1/10になっていることから、出力トルクは減少しますが電流位相も
40.3416deg⇒18.5832degと大きく減っている(電流ベクトルとしてq軸寄りになっている)ことが
わかります。
条件③
最後に条件③です、電流振幅が100AでPMSMのパラメータをLq: 0.067(H) ⇒ 0.037(H)に
変更した場合の特性を示しています。条件①と同様の電流振幅ですが、トルク最大値をとる電流位相が30.0024degと条件①の時の40.3416degよりも減少している(q軸寄りになっている)ことが
わかります。また、トルクの最大値も条件①の259.808Nmで、547.163Nmよりも減少しています。

シミュレーション結果考察
シミュレーション結果について考察を行います。
条件①
条件①のシミュレーション結果について検討していきます。
電流位相を0degから増加させていくにしたがって出力トルクも増加していき、電流位相=40.3416degで最大値となった後は出力トルクが減少していきます。
この理由を②式を使って説明していきます。冒頭でも触れた通り、突極性がない場合は
マグネットトルク(②式の第一項)のみしか出力できなかったのに対して、突極性のある場合は
マグネットトルクに加えて、リラクタンストルク(②式の第二項)も利用することができます。
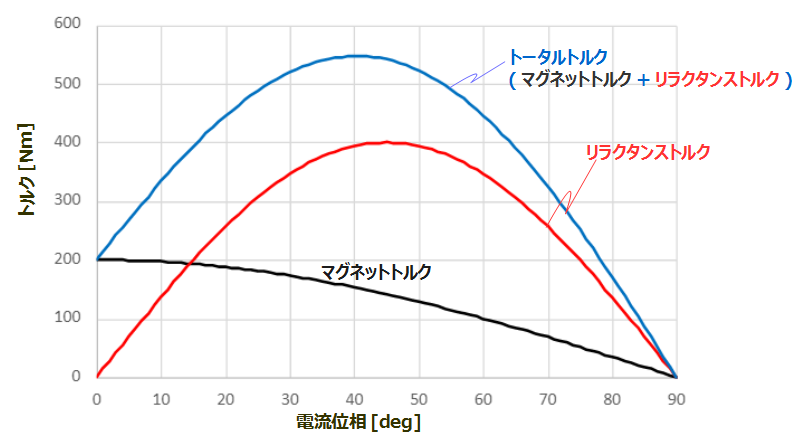
このことを詳しく説明するため、電流振幅を100Aで固定して、電流位相βを0⇒90degまで
変動させた場合の②式のグラフを作成して、下図に示します。第一項(黒線)はCOSβで変動、
第二項(赤線)はSIN2βなので、第一項(黒線)の2倍周波数で変動します。突極性がなければ、
第一項(黒線)のみしか利用できないため、電流位相0degでトルクが最大となります。一方で、
突極性がある場合は第一項と第二項の合計でトルクが決まります(下図ではトータルトルクと記載)。
そのため、第一項(黒線)が最大の0degから第二項(赤線)が最大の45degの間でトータルトルクが
最大値をとります。
つまり、電流振幅が一定の場合でも電流位相を適切に設定することにより、効率的にトルクを
出力することができることを表します。
このような制御方式を最大トルク/電流制御(MTPA制御)と一般的に呼びます。
電流振幅に対する出力トルクを最大化できることを意味していますが、指令トルクに対して
最小の電流振幅を選択できるとも捉えられることから銅損が最小となる制御としても知られています。
このような理由で、条件①ではマグネットトルク最大時の電流位相0degと
リラクタンストルク最大時の電流位相45degの間でトルク最大値をとっていることがわかります。
条件②
条件②のシミュレーション結果について、電流振幅を条件①の場合の100Aから10Aに
減少させることでトルクが最大となる電流位相が条件①の40.3416deg⇒18.5832degと
減少する理由を検討していきます。
出力トルクの①式を変形してIqについて解くと③式のようになります。
\[Iq = \frac{T}{Pn\{ψ_f+(Ld-Lq)Id\}}・・・③\]
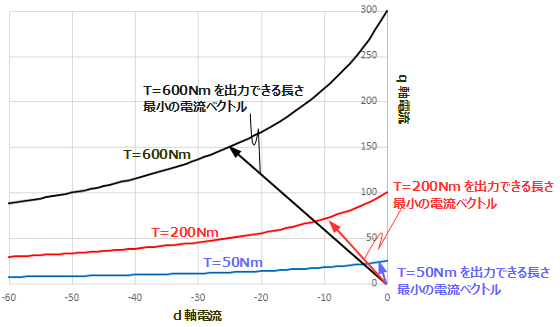
③式のトルクTを一定値として、Idを変動させた場合のIqを計算してグラフ上にプロットしていくと
下図のような曲線が得られます。下図にはT=600Nm、200Nm、50Nmとした場合の計算結果
を示しています。冒頭に記載の通り、同一トルクを出力するためのdq軸電流の組み合わせは
無数にありますが、それをつないだ線が下図になります。例えば、T=600Nm(黒色)の曲線上の
dq軸電流になるようにモータに電流を流し込むことで、出力トルクは600Nmとなります。
このような曲線を等トルク曲線と呼びます。
ここでこの曲線上の各点に原点から直線を引いた場合の長さIについて考えてみます。
式としては以下になり、電流振幅を表しています。ここから、等トルク曲線上への原点からの
距離が最短となるdq軸電流(=電流振幅,電流位相)が前項でも述べたMTPA制御の動作点
であることがわかります。
\[I = \sqrt{Id^2+Iq^2}・・・④\]
これを各トルク(T=600Nm、200Nm、50Nm)で行ったのが、下図の○○Nmを出力できる長さ最小の電流ベクトル、の矢印(ベクトル)となっています。
ここから、出力トルクが下がっていくにしたがって、最小の電流ベクトルの電流位相(q軸とのなす角)も減少していっている様子が確認できます。これが、出力トルク(条件②の場合は電流振幅)が下がることによってMTPA制御のための電流位相が小さくなる理由となります。
条件③
条件③のシミュレーション結果について解説していきます。PMSMのパラメータが
Lq: 0.067(H) ⇒ 0.037(H)になることによって、トルクが最大となる位相が条件①の時よりも
減少しています(q軸寄りになっています)。
これはリラクタンストルクがLd-Lqの大きさによって決まるためです。条件③のようにLqを減少させるようにパラメータを変更するとLd-Lqの大きさが小さくなり(Ldは固定しているため)、
リラクタンストルクが減少してしまいます。これによって、リラクタンストルクを
利用できる余地が小さくなった分、マグネットトルクの比率を増やそうとすることにより、
電流位相が減少(q軸寄りになる)するように変化していきます。
(補足)SimView機能紹介~ピーク値の探索方法~
SimViewの機能として、ピーク値を探索する機能があります。
例えば、下図の上から3番目がトルク(信号名:Tem_PMSM31)を示していて、時間変化している波形となっています。
この波形のピーク値を探したい場合、まずは![]() を押してカーソルを表示させます。
を押してカーソルを表示させます。
続いて、ピークを探索したい信号の信号名、今回の場合Tem_PMSM31をクリックすることにより、
ピーク値を探索する対象を選択します。
最後にGlobal Maxのボタン![]() を押すことにより、ピーク値をとっている位置に自動的にカーソルを
を押すことにより、ピーク値をとっている位置に自動的にカーソルを
移動させることができます。数値についてはMeasureウィンドウに表示されます。
まとめ
今回は突極性のあるPMSMでは突極性を利用することにより、効率的にトルクを出力することができ、銅損を最小にすることに有用な制御手法としてMTPA制御を取り上げて説明を行いました。
また、この制御手法を満足する条件はモータのパラメータや電流振幅によって都度異なってくること、つまりモータの状況に応じて、常に最適な電流位相を選択することにより高効率な制御が可能となる
ことをシミュレーションによって確認していきました。
以上がPMSMの最大トルク制御の解説となります。
お疲れさまでした!

コメント