本記事ではフィードバック制御(閉ループ制御)の実現方法を解説しています。開ループ制御と閉ループ制御の特徴や、閉ループ制御を実現するためによく用いられるPI制御の構成方法について紹介した後、RL回路を対象に、PI制御の適用方法についてシミュレーションと併せて説明しています。
開ループ制御と閉ループ制御
概要
制御対象への入力(制御入力)の決定方法により制御方式は開ループ制御と閉ループ制御に大別されます。
開ループ制御:制御対象の状態を計測なしに制御入力を決定する制御方法
予め定めた制御入力を制御対象に入力し続ける
閉ループ制御:制御対象の状態の計測に基づいて制御入力を決定する制御方法
制御量を検出して目標値と比較し、制御器がその差に応じて、
しかるべき操作量を制御対象に加える
以前の記事でPMSMのFF制御とFB制御について説明しましたが、FF制御が開ループ制御、FB制御が閉ループ制御となります。
開ループ制御と閉ループ制御の特徴
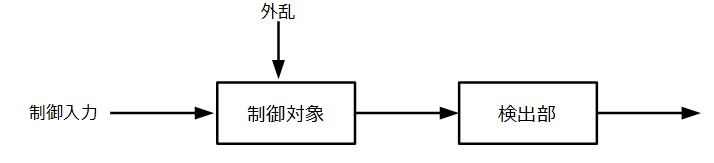
下図に開ループ制御と閉ループ制御のブロックを示しています。
なお、図中の外乱とは制御対象に作用して、制御量を好ましくない状態に変動させる原因となるもののことを指します。
例えば、上記の記事内の制御器と制御対象のパラメータのずれが外乱に当たります。
開ループの場合、制御対象の状態の計測なしで制御入力を与えているため、外乱により制御量が好ましくない状態に変動しても対処することができなくなってしまいます。
一方、閉ループの場合は、制御対象の状態を計測しているため外乱の影響を無くすように制御入力を決定することができます。
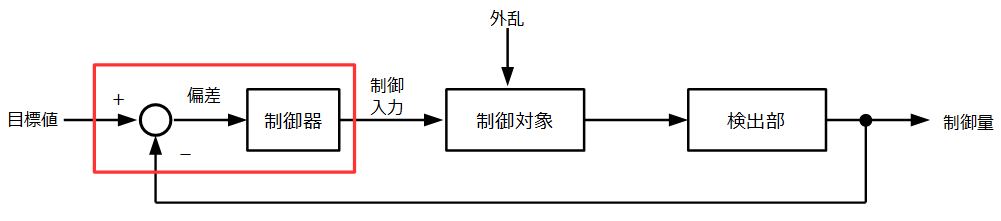
このように閉ループ制御を用いることにより、外乱があった場合にも精度よく制御量と目標値を一致させることができます。
次章では閉ループ制御の制御入力を決定するための方法(PI制御)について解説します。
PI制御
概要
上図の通り、閉ループ制御は目標値と制御量の差(偏差)を0にするように制御入力を逐次計算して決定していますが、この計算を行う場合によく用いられる手法としてPI制御が挙げられます。
そこで、本章ではPI制御の詳細について解説していきます。
構成要素
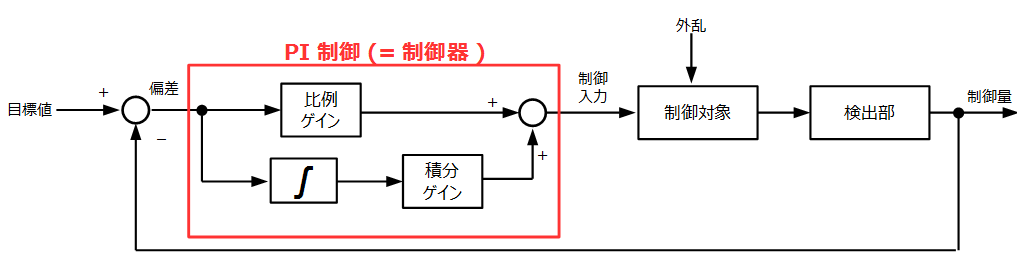
PI制御は比例制御と積分制御の2要素で構成されています。
比例⇒Proportinal、積分⇒Integral の頭文字をとってP制御(P成分)、I制御(I成分)とも呼ばれます。
それぞれの内容と特徴は以下の通りです。
【比例制御】
偏差に対してゲイン(増幅率)を掛けて制御入力を演算
※このゲインを比例ゲインと呼びます。
偏差を連続的に評価し、制御量を目標値に近づけるために制御入力を増減
制御量が目標値を上回ったら(偏差<0)なら制御入力<0
逆に制御量が目標値を下回ったら(偏差>0)制御入力>0
【積分制御】
偏差を積分した後、積分結果にゲインを掛けて制御入力を演算
※このゲインを積分ゲインと呼びます。
偏差の持続時間と大きさを観測して、長時間持続する偏差を消去するように制御入力を増減
偏差の持続時間が長ければ長いほど、総計(積分した値)はより大きくなり、より大きな制御入力が得られます。
それぞれのブロックは下図のようになり、一般的にP制御とI制御の和によって制御入力を決定しています。つまり上記2成分の組み合わせによって閉ループ制御が成り立っていることになります。
シミュレーション
シミュレーション概要
実際にPI制御を構築して制御量を目標値通りに制御できるかどうかを確認してみましょう。
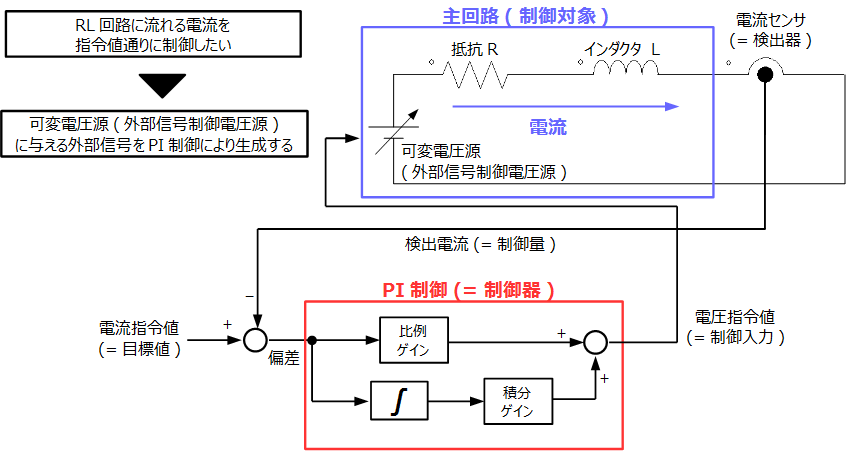
今回対象にするのは以下に示すようなRL回路とします。前章のPI制御ブロックと対比すると以下のようになります。
目標値 = 電流指令値
制御量 = 検出電流
偏差 = 電流指令値 – 検出電流
制御入力 = 電圧指令値(外部信号によって制御する可変電圧源への制御信号)
制御対象 = 主回路:抵抗、インダクタ、可変電圧源により構成
検出器 = 電流センサ
シミュレーションでは電流指令値として10Aを与えて、PI制御により制御量である検出電流の応答を確認していきます。
なお、シミュレーションは以下の3通りを行います。
ケース① P制御のみ使用する場合
ケース② P制御+I制御両方使用する場合
ケース① P制御のみ使用する場合
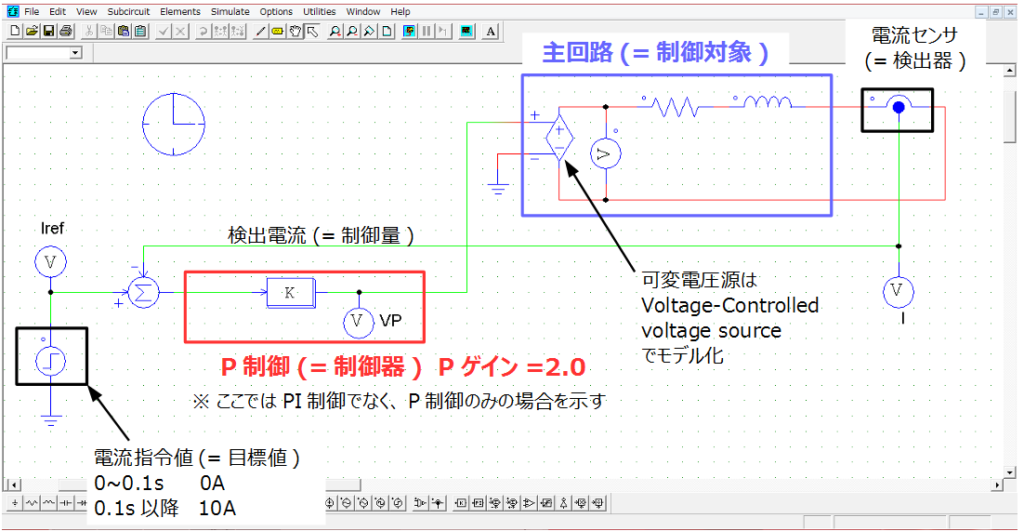
PSIMで構築したシミュレーションモデルが下図になります。
また、回路構成要素をそれぞれ以下に示しておきます。
【主回路】
抵抗 R = 1.0 Ω
インダクタ L = 5 mH
可変電圧源はVoltage-Controlled voltage sourceで構成(制御信号と相似な電圧をRLに印加する)
【電流指令値】
電流指令値IrefはStep Voltage Sourceを使って、以下のように与えます。
\[
Iref=
\begin{cases}
0 & (0≦t<0.1)\\
10A &(0.1≦t)
\end{cases}
\]
【制御器(P制御)】
ここでは偏差に対して比例ゲイン(Pゲイン)を掛けて制御入力を生成するP制御のみとします。
Pゲイン=2.0
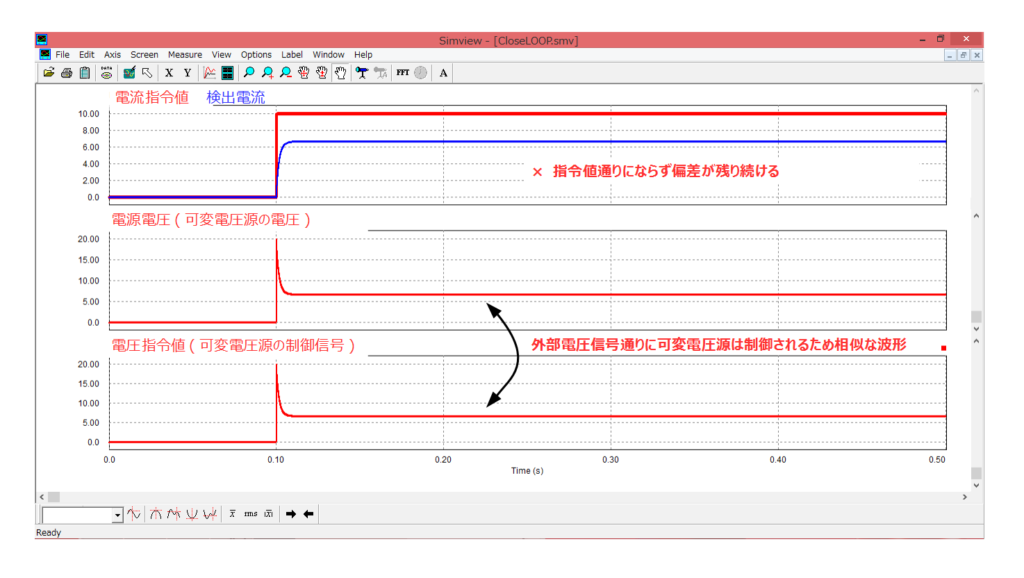
シミュレーションの結果が下図です。
まず、0.1sで電流指令値が10Aに立ち上がった直後、電流も増加して一定値になってはいますが、十分時間が経っても6.6A程度しか流れておらず、指令値通りにならない(偏差が残り続ける)状態となってしまっています。
RL回路に印加されている電圧(電源電圧や電圧指令値)を見てみても6.6V程です。今回のシミュレーション回路の回路方程式は以下になり、
\[V = Ri + L \frac{di}{dt} \]
十分時間が経った定常時は微分項が無視できるので以下のようになります。
\[V = Ri \]
つまり、電流を10Aにしたい場合、電源電圧も10V出力している必要があります(抵抗R=1.0 Ωより)。これに対して、電圧が6.6Vより指令値通りになっていない結果となりました。
これはP制御のみの場合・・・
偏差に対してPゲインを掛けて制御入力(電圧指令値)を決定
↓
電圧指令値に応じた電圧をRLに印加
↓
偏差が小さくなる方向に電流が変化
↓
偏差が小さくなると、制御入力(電圧指令値)も小さくなる(偏差×Pゲイン のため)
↓
電圧指令値が小さくなるとRLに印加する電圧も小さくなり、偏差が再度大きくなる
のようになるためです。
以上のようにP制御のみだと偏差が残り続けることになります。
ケース② P制御とI制御両方使用する場合
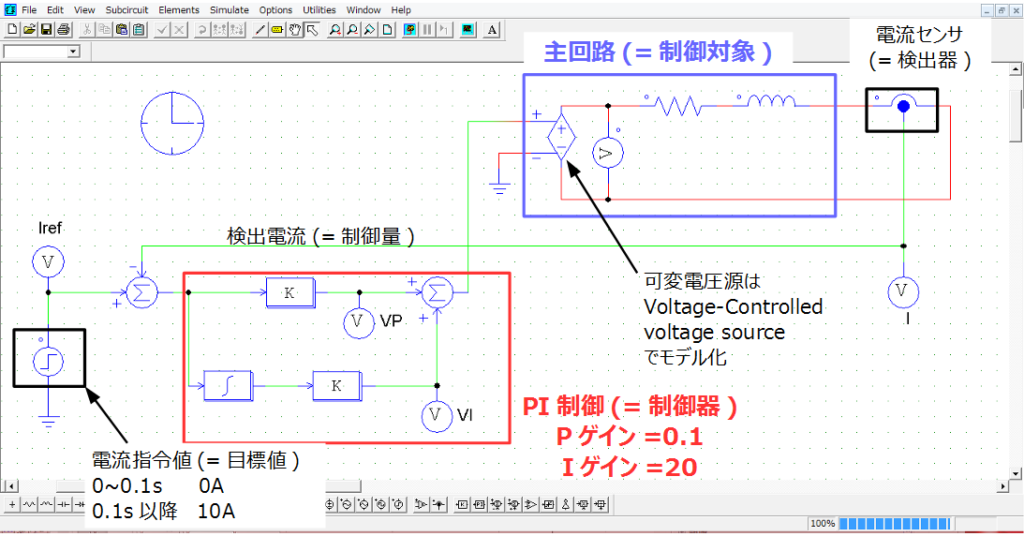
次にI制御も追加して、P制御とI制御の両方を使用する場合のシミュレーションを行ってみます。
基本条件はケース①と同じです。制御器のみI制御を追加して以下のようになっています。
シミュレーションモデルは下図です。
【制御器(PI制御)】
P制御+I制御で構成しています。
Pゲイン = 0.1
Iゲイン = 20
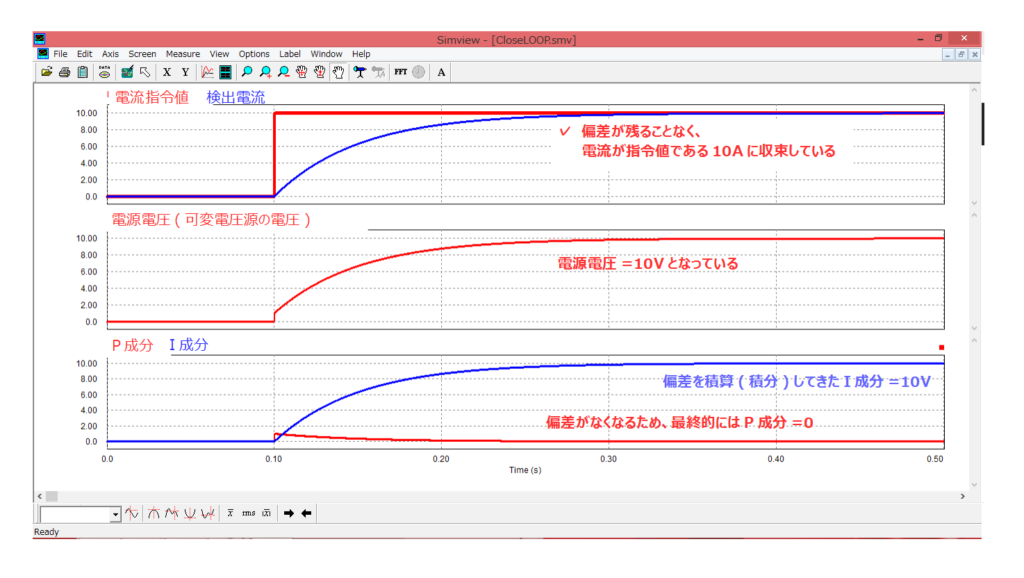
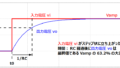
シミュレーションの結果が下図です。
P制御のみの場合とは異なり、電流指令値通りの10Aが流れていることが確認できます。
また電源電圧も10Vになっています。
P成分は偏差が0になるにつれて0になっていきます。
一方のI成分は偏差を積算して出力を演算しているため、偏差がなくなっても10Vを出力し続けています。このようにI制御も加えることにより、定常的な偏差を0にすることが可能になります。
このように適切にP制御とI制御を組み合わせることにより、制御量を目標値通りに制御することが可能になります。
以上が開ループ制御と閉ループ制御の特徴、PI制御の構成方法とRL回路を用いたPI制御のシミュレーション結果の解説になります。
お疲れさまでした!

コメント